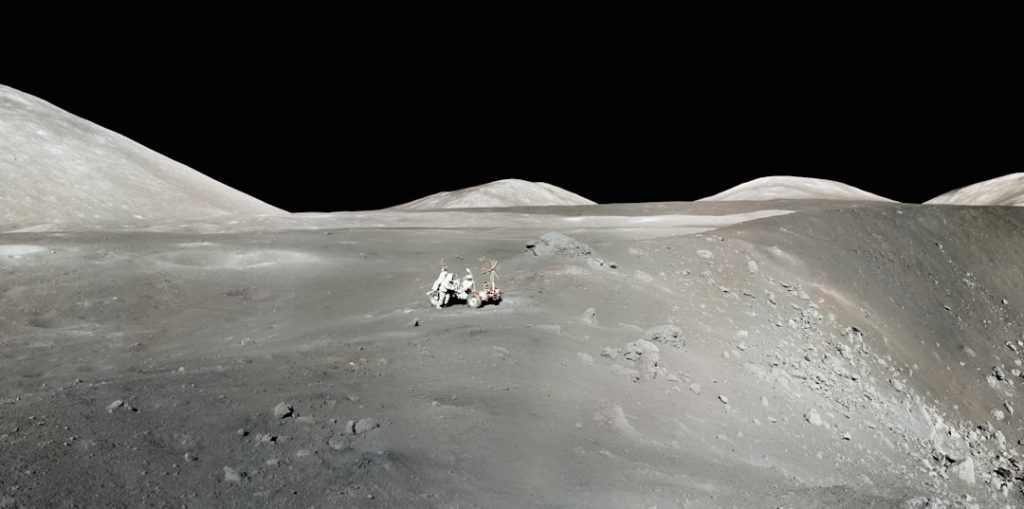
NASAが開発中の最新ローバープロトタイプの砂漠フィールドテストを実施したと発表しました。このテストは火星や月での無人探査ミッションに向けた重要な検証ステップとなります。
砂漠試験での検証内容
砂漠環境でのテストでは、新型ローバーの走行性能、センサー機能、自律運用能力が本格的に試されました。火星のクレーター地形や月面の凸凹した地表を想定した複雑な地形を、実際に走破する能力が確認されたとみられます。悪条件下での通信システムの安定性、カメラやレーダーといった観測機器の精度も重要な評価項目でした。このプロトタイプは従来機より軽量化と耐久性を両立させた設計になっており、長距離移動での消費電力削減が実証されたとされています。
次世代火星探査への道
NASAは2030年代の本格的な火星有人ミッション実現を目指しており、このローバー開発はその基盤を築く極めて重要なプロジェクトです。無人探査フェーズでは、着陸地点の詳細な地質調査や生命の痕跡探索を担う必要があります。新型ローバーに搭載予定のドリル装置やサンプル採取機器も今回のテストで検証されたとみられ、深さ数メートルの地層へのアクセスが可能になることで、火星の地下環境に関する科学的知見が大きく深まることが期待されています。
国際宇宙開発競争への影響
中国やロシアも独自の火星探査計画を進める中、米国のこうした技術的先導は宇宙大国としての地位維持に不可欠です。日本の宇宙航空研究開発機構(JAXA)も将来的な火星探査への参画を視野に入れており、このNASAのテスト成果は国際協力の可能性を広げる重要な要素となります。ローバー技術の進化は、月面基地の建設支援や小惑星探査の拡大にも応用される見通しです。
関連動画